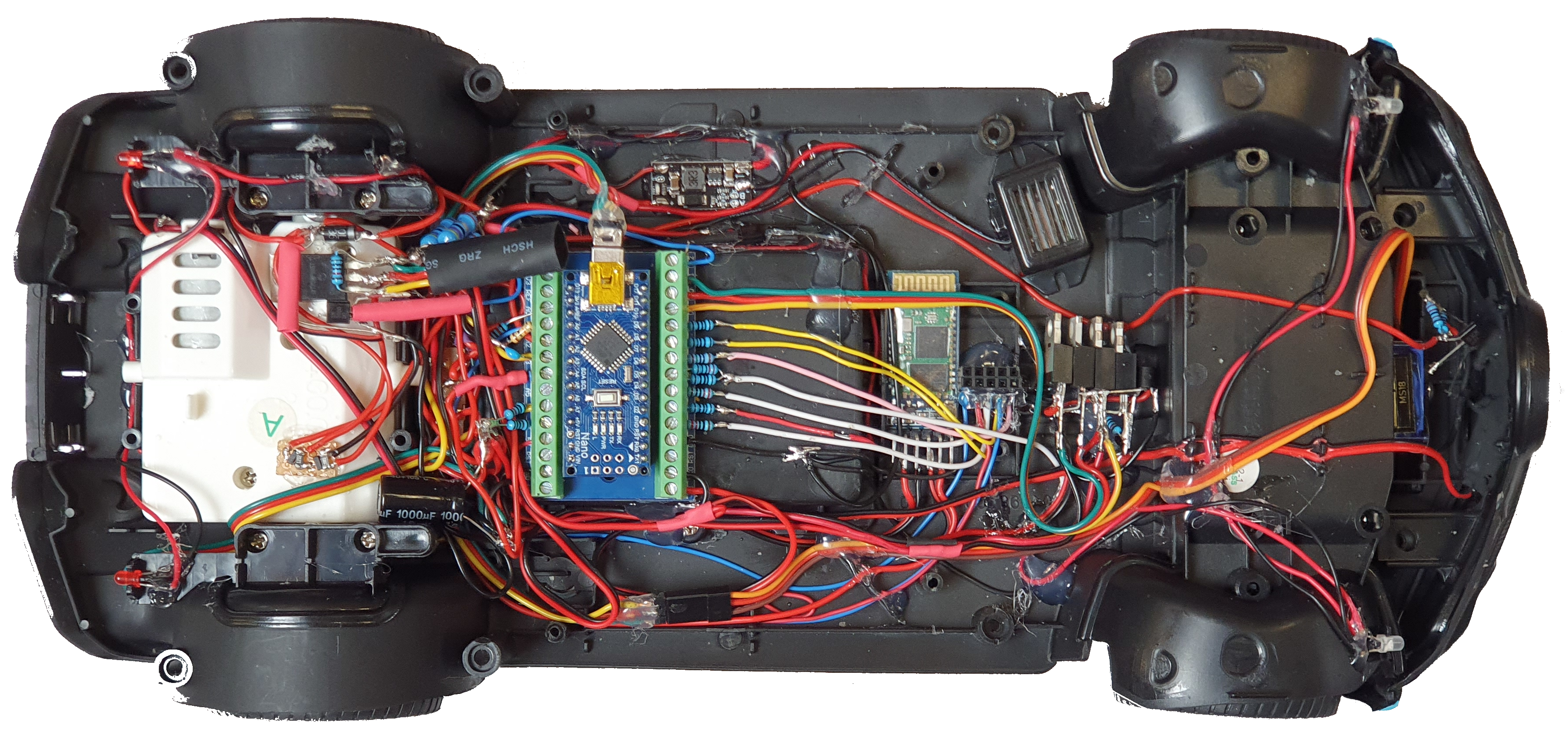
Hardwareaufbau
Mithilfe eines Arduino Nanos in Verbindung mit einem konfigurierten Bluetoothmodul HC-06 kann die Steuerung dieses Fahrzeuges gewährleistet werden. Ein aus 4 Mosfets nachgebauter 4-Quadrantensteller sorgt dafür,
dass sich der Motor in beide Richtungen antreiben und bremsen lässt. Um eine stabile Spannungsversorgung zu gewährleisten wird die, je nach Akkustand variierende Akkuspannung (3,7V - 4,2V), mit einem Boostconverter auf
5V für die gesamte Elektronik stabilisiert. Die Geschwindigkeitsmessung erfolgt mithilfe eines Hallsensors und 2 Magneten (gegengleich gepolt, gegenüber befestigt) am hinteren rechten Rad. Die Objekterkennung wird mit
einer Infrarotsender- und empfängerdiode realisiert, wobei der Abstandssensor jedoch nur bei der Absenz von Sonnenlicht funktioniert. |
 |
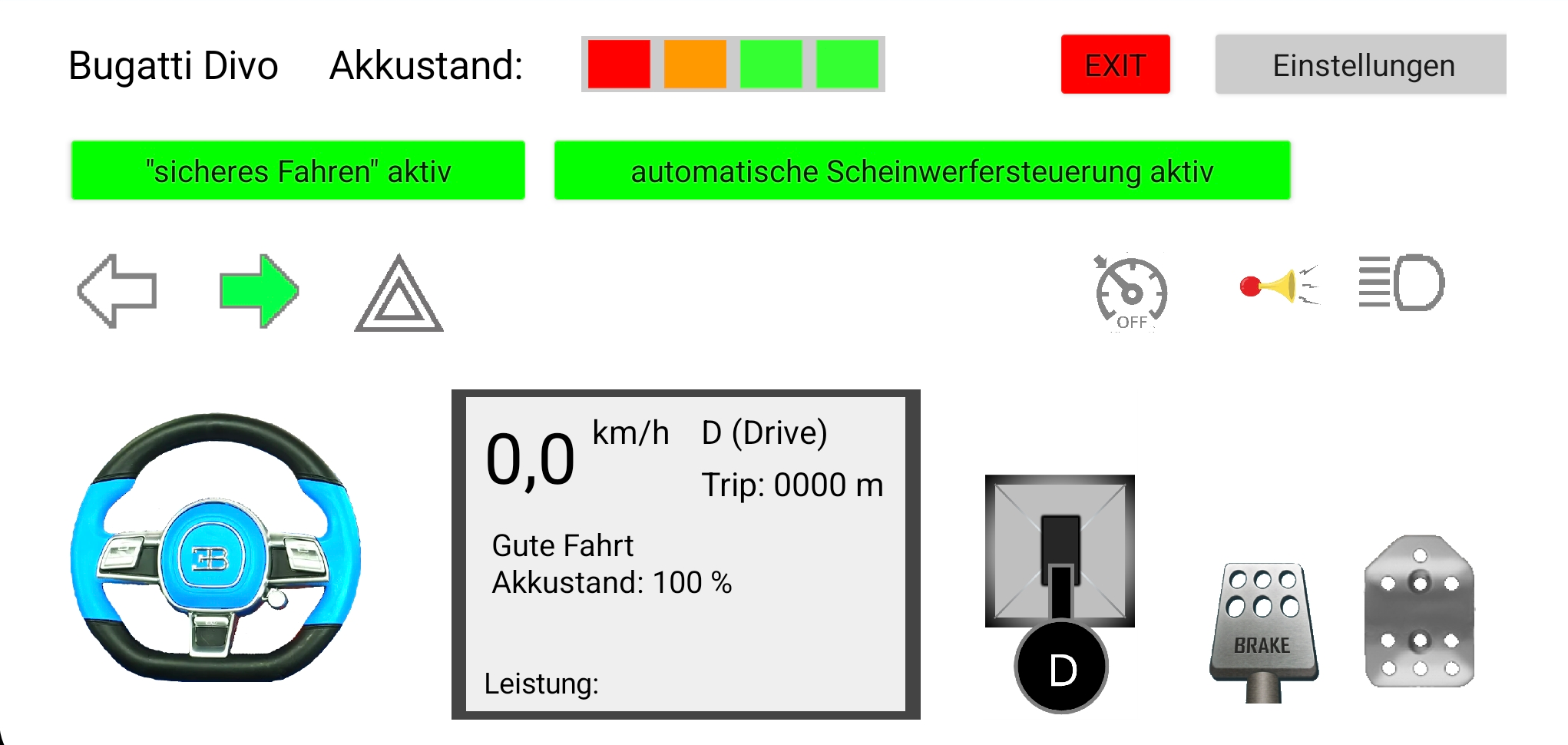
Software (Arduino + App)
Die in MIT APP INVENTOR programmierte App steht in ständiger Kommunikation mit dem Modellauto, sodass ca. alle 40ms ein Datenpaket mit allen benötigten Informationen in beide Richtungen gesendet wird. Zusätzlich zur Fahrsteuerung ist es in der App
möglich, Lichtmodis (OFF/automatisch/Begrenzungslicht/Abblendlicht/Fernlicht) anzupassen und Blinker, oder den Tempomat ab 2km/h Geschwindigkeit, zu setzen.
Das Display in der Mitte zeigt aktuelle Meldungen des Autos (ob eine Tür offen ist, ein Hindernis oder eine Motorüberlast erkannt wurde, ...) an. Das drehbare Originallenkrad des Bugatti Divos zentriert sich automatisch, wenn die Geschwindigkeit größer als 0 ist.
Im "sicheren Modus" wird die Geschwindigkeit auf 2,5km/h begrenzt und das Auto bremst sofort ab, wenn ein Hindernis oder eine offene Tür erkannt wird. Wenn von einer Geschwindigkeit > 3km/h abgebremst wird, schaltet sich automatisch für eine kurze Zeit die Warnblinkanlage ein.
Wenn mehr als 85% Antriebsleistung gegeben wird und für länger als 2,5 Sekunden keine Geschwindigkeit erkannt wird, schaltet sich der Motor für 30 Sekunden ab und es wird eine Fehlermeldung (= Motorüberlast) in der App angezeigt (+ autom. Aktivierung der Warnblinkanlage). Zudem befindet sich sogar ein Ein- und Ausparkassistent im Programm des Autos, der das Rangieren beim Seitwärtsparken automatisiert.
Falls das Auto über den USB-C Stecker aufgeladen wird, bleiben der Motor und Servo deaktiviert und das Rücklicht pulsiert. |
 |


